Python -> 可执行 -> arm架构设备
拓扑识别程序终端部署
基本情况
-
硬件:能源控制器开发板
-
系统:Ubuntu 16.04.1 LTS (GNU/Linux 3.10.108 armv7l)
方案一
容器镜像:arm32v7pandas:tepo
说明:该镜像适用于arm32v7架构设备,内含python3.7版本,内置numpy、pandas等所需python库。后续可添加AI相关库,应用于窃电识别、负荷预测等以python为基础开发的项目。
不足:经过精简后大小达600MB,后续添加其他库大小会继续增加。

运行情况
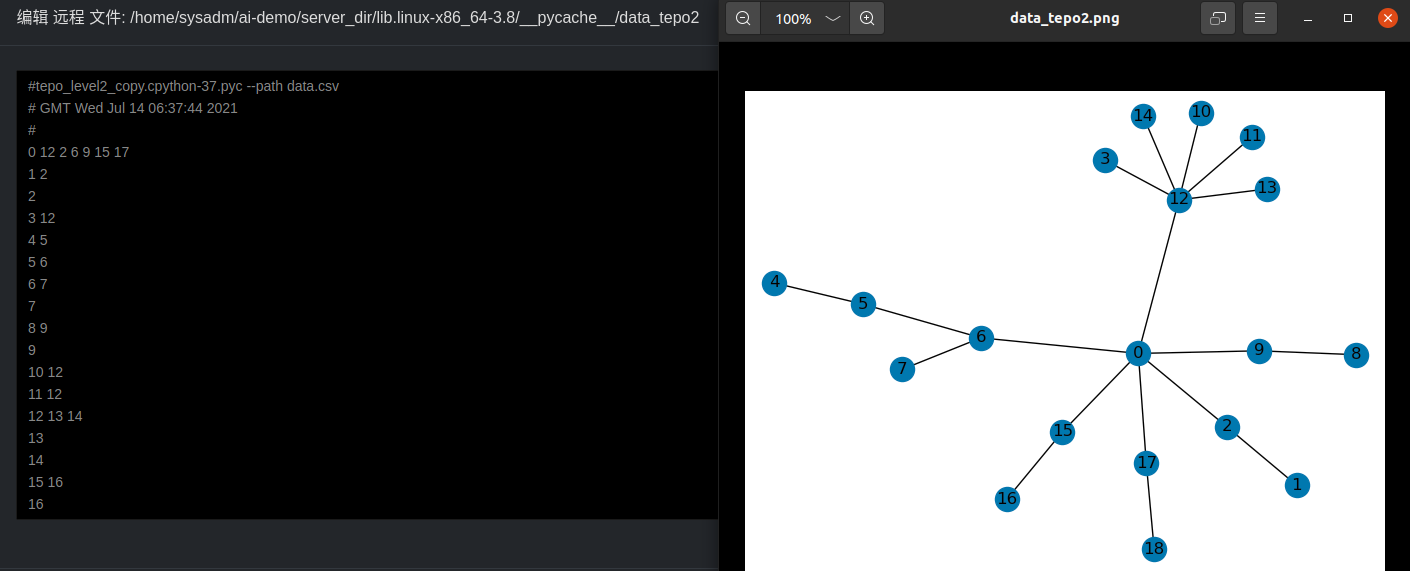
在容器中运行:python tepo_level2_copy.cpython-37.pyc --path data.csv

结果:在原路径生成data_tepo2文件(节点的邻接表)、data_tepo2.png(节点拓扑图)
资源消耗
程序耗时20-30s,具体取决于计算数据量。
(笔记本测试耗时4-5s,由于开发板CPU算力有限,耗时翻倍)
测试AI程序
模型文件:model.lite ( 用于mnist手写数字识别的神经网络模型文件,build by tensorflow-lite )
测试程序:minimal(基于TF-lite框架,使用c语言交叉编译的示例程序,用于检测模型内部参数。)

方案二
容器镜像:arm32v7/python:3.7slim
说明:该镜像适用于arm32v7架构设备,内含python3.7版本,为了压缩大小不含其他python库。大小为87.2MB。
程序:经pyinstaller或者nuitka打包后的可执行文件。源程序约为275MB。
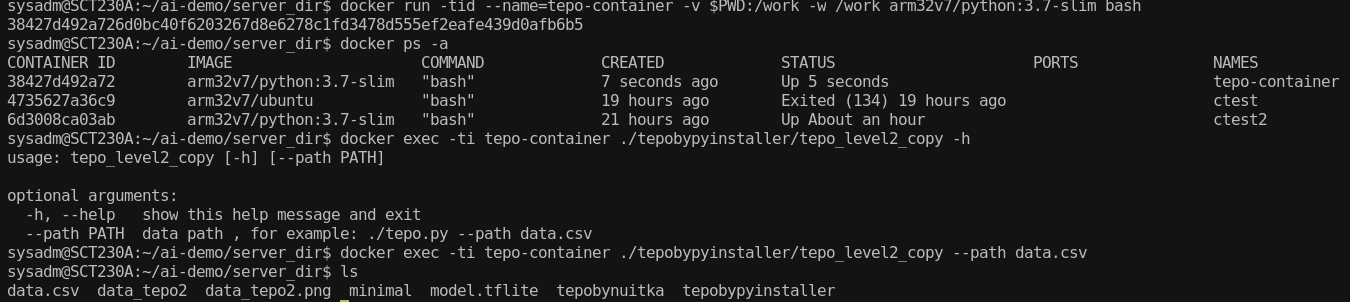
程序说明:docker run --rm=true -v $PWD:/work -w /work arm32v7/python:3.7-slim ./tepobypyinstaller/tepo_level2_copy -h
usage: tepo_level2_copy [-h] [--path PATH]
optional arguments:
-h, --help show this help message and exit
--path PATH data path , for example: ./tepo.py --path data.csv

使用说明
- 运行一个一次性使用的容器跑程序 ./tepobypyinstaller/tepo_level2_copy为程序路径,–path参数选择文件。
docker run --rm=true -v $PWD:/work -w /work arm32v7/python:3.7-slim ./tepo_lv2/tepo_lv2 --path data.csv
- 或者开启一个常驻容器
docker run -tid --name=tepo-container -v $PWD:/work -w /work arm32v7/python:3.7-slim bash
docker exec -ti tepo-container ./tepo_lv2/tepo_lv2 -h
docker exec -tid tepo-container ./tepo_lv2/tepo_lv2 --path data.csv
build.sh
echo '>>>>>>导入容器镜像arm32v7-python.tar.xz'
docker load -i armpython.tar.xz
docker images
echo '>>>>>>tepo_lv2为打包后的拓扑识别程序(lv2即识别二级节点)'
echo '>>>>>>开启容器tepo-container'
docker run -tid --name=tepo-container -v $PWD:/work -w /work arm32v7/python:3.7-slim bash
docker ps -a
echo '>>>>>>帮助信息'
chmod 777 ./tepo_lv2/tepo_lv2
docker exec -ti tepo-container ./tepo_lv2/tepo_lv2 -h
echo '>>>>>>运行程序,需要识别数据为data.csv'
docker exec -tid tepo-container ./tepo_lv2/tepo_lv2 --path data.csv
echo '>>>>>>文件data_tepo_lv2即为识别的节点邻接表'
run.sh
#!/usr/bin/env bash
echo '开启一次性容器运行'
docker run --rm=true -v $PWD:/work -w /work arm32v7/python:3.7-slim ./tepo_lv2/tepo_lv2 -h
docker run --rm=true -v $PWD:/work -w /work arm32v7/python:3.7-slim ./tepo_lv2/tepo_lv2 --path data.csv
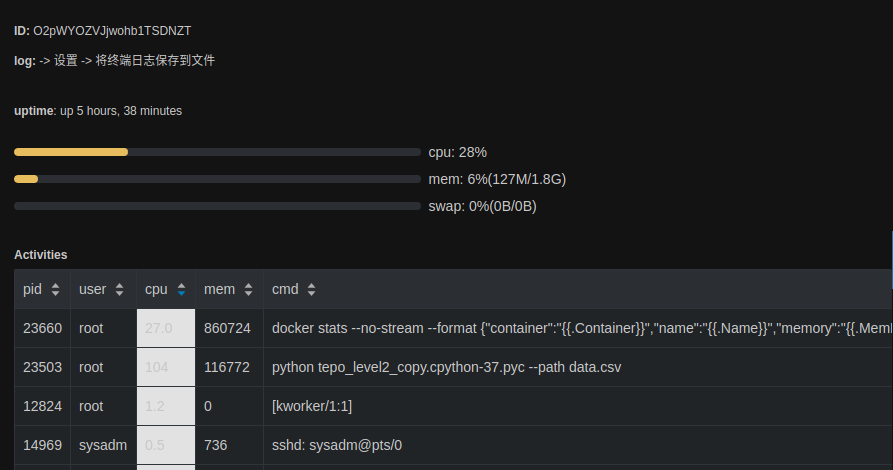
资源消耗
在测试环境的能源控制器上,开启所有能源控制器基础APP,CPU占用率在50%~60%。
通过开启docker运行拓扑识别APP,识别data.csv测试数据,CPU占用增长至80%~90%,计算时间在20s~30s。
方案三
问题:由测试同事反馈,能源控制器上规定三个固定容器,上述拓扑识别APP要考虑部署至规定容器中或直接部署在系统上。
解决计划:配置一套与能源控制器一样的编译环境,解决python打包工具无交叉编译的问题。
程序:基于unbuntu16.04(glibc2.23)的环境编译程序,可以不使用容器,直接在能源控制器系统上运行。
无需额外特定的容器镜像,只有打包后的源程序,大小在208.3MB。
问题
程序cpu占用率过高
-
从Linux系统层限制
-
使用命令
nicenice 命令用于设定进程的优先级,取值范围[-20,19],-20为最高,19为最低。
nice -n 19 ./tepo_lv2/tepo_lv2 -h -
使用程序
cpulimit安装方法:apt 或者源码构建(基于ubuntu16.04构建可用)cpulimit
cpulimit 可以为进程设置CPU使用率上限值并实时监控,若超出上限则暂停运行一段时间
# 使用-l * 限制CPU使用率上限 # 使用cpulimit的-i参数同时限制其子进程的资源占用: cpulimit -i -l 20 ./tepo_lv2/tepo_lv2 -h -
cgroups 命令集
Linux 内核提供的一种机制,利用它可以指定一组进程的资源分配,不限于CPU。该命令只在多个进程争抢资源时才生效。
python中的resource库作用类似。
-
-
从python代码限制
-
该模块提供了用于测量和控制程序使用的系统资源的基本机制。
setrlimit()函数被用来设置特定资源上面的软限制和硬限制。 -
pstuil模块
系统管理运维:监控系统运行的状态
-
-
python代码性能优化